I/O多线程网络驱动模型
本系列文章从Redis的多线程驱动模型讲起,顺便讲解一下Redis是怎么处理客户端发过来的请求的,这样在后续讲解Redis的其他部份的源码实现会容易理解一些。
Redis网络I/O模型
常用的SELECT/POLL/EPOLL模型的介绍,网上的资料已经讲烂了,这里就不过多介绍了,有需要的朋友可以点击这个查看。由于我们是开发程序员,所以这里总结一下这几种IO模型的区别。
| select | poll | epoll | |
|---|---|---|---|
| 性能 | 高并发连接数时性能很差 | 高并发连接数时性能很差 | 性能基本没有变化 |
| 连接数 | 一般1024 | 无限制 | 无限制 |
| 数据结构 | bitmap | 数组 | 红黑树 |
| 内在处理机制 | 线性轮询 | 线性轮询 | 直接遍历事件 |
| 时间复杂度 | O(n) | O(n) | O(1) |
Redis支持网络I/O模型有以下几种
- evport: 用于 Solaris 操作系统上的事件驱动I/O模型, 与select这些I/O多路复用的模型很想,能够高效地监控多个文件描述符的事件
- kqueue: 用于 macOS/FreeBSD 操作系统上的事件驱动I/O模型
- epoll: 用于 Linux 操作系统上的事件驱动I/O模型
- select: 如果上面几种都不支持,会用select事件驱动I/O模型
具体的代码如下所示:
#ifdef HAVE_EVPORT
#include "ae_evport.c"
#else
#ifdef HAVE_EPOLL
#include "ae_epoll.c"
#else
#ifdef HAVE_KQUEUE
#include "ae_kqueue.c"
#include "server.h"
#else
#include "ae_select.c"
#endif
#endif
#endif由于常用的还是epoll模型,所以这里简单地介绍一下epoll的几个API,具体Epoll的使用可以查看这个.
// 等待监听的所有fd相应事件的产生
int epoll_wait(int epfd, struct epoll_event * events, int maxevents, int timeout);
// 注册特定文件描述符,将其添加到 epoll 实例的interest list中
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *_Nullable event);
// 创建一个新的 epoll 实例,自 Linux 2.6.8 起,size 参数将被忽略,但必须大于 0
int epoll_create(int size);Reactor模型
Reactor模型是网络服务器用来处理高并发网络I/O请求的一种编程模型。
首先我们来看一下客户端和服务端的交互过程中,不同类请求在服务器端引发的待处理事件:
- 当一个客户端要和服务器端进行交互时,客户端会想服务器端发送连接请求,用来建立连接,这就对应了服务器端的一个连接事件
- 一旦连接建立后,客户端会给服务器端发送读请求,以便读取数据。服务器端在处理读请求时,需要向客户端写回数据,这对应了服务器端的写事件
- 无论客户端给服务器端发送读或写请求,服务器端都需要从客户端读取请求内容,这些读写请求的读取对应了服务器端的读事件
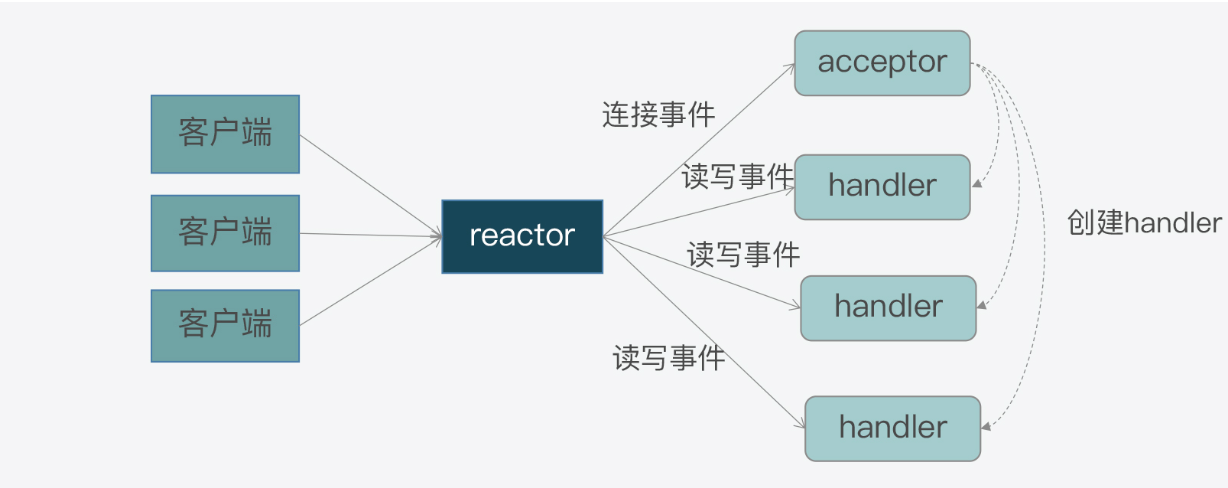
在Reactor模型中,主要由reactor/acceptor/handler三个关键角色来处理上面三种事件。
- 连接事件由acceptor来处理,负责接收连接;acceptor接收完请求后,会创建handler,用于网络上对后续读写事件的处理
- 读写事件由handler处理
- 最后,在高并发场景下,连接事件,读写事件会同时发生,需要有一个角色专门监听和分配事件,这就是reactor要做的事。当有连接请求的时候,reactor将产生的连接事件交由acceptor处理;当有读写请求时,reactor将读写事件交由handler处理。
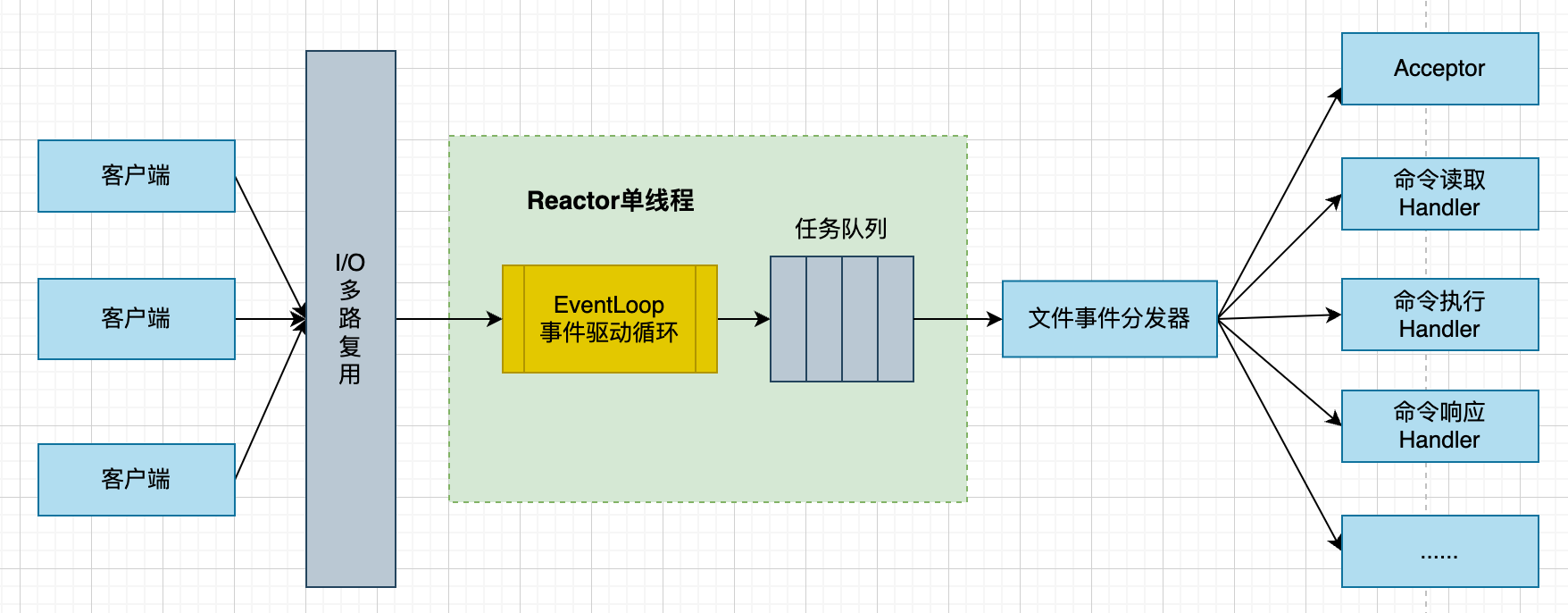
Reactor模型实现
Redis的网络框架实现Reactor模型,并且自行开发实现了一个事件驱动框架,对应的代码实现是ae.c,对应的头文件是ae.h。
Redis为了实现事件驱动框架,响应的定义了事件的数据结构,框架主循环函数,事件捕获分发函数,事件和handler注册函数。
aeFileEvent
Redis事件驱动框架有两类事件: IO事件和时间事件,分别对应了客户端发送的网络请求和Redis自身的周期性操作。由于本篇介绍的是IO驱动模型,所以我们直接看IO事件的定义
/* File event structure */
typedef struct aeFileEvent {
// 事件类型源码,用来区分是什么事件
int mask; /* one of AE_(READABLE|WRITABLE|BARRIER) */
// AE_READABLE事件处理函数, 读事件处理函数
aeFileProc *rfileProc;
// AE_WRITABLE事件处理函数, 写事件处理函数
aeFileProc *wfileProc;
// 指向客户端私有数据的指针
void *clientData;
} aeFileEvent;Redis在ae.h文件中,还定义了支撑款架运行的主要函数,包括框架主循环的aeMain函数,负责事件捕获与分发的aeProcessEvents函数,以及负责事件的handler注册的aeCreateFileEvent函数。
int aeCreateFileEvent(aeEventLoop *eventLoop, int fd, int mask, aeFileProc *proc, void *clientData);
void aeMain(aeEventLoop *eventLoop);
int aeProcessEvents(aeEventLoop *eventLoop, int flags);事件注册:aeCreateFileEvent函数
Redis启动后,服务器程序server.c的main函数调用initServer来初始化事件的监听,以及响应的事件处理函数。
void initServer(void) {
server.el = aeCreateEventLoop(server.maxclients+CONFIG_FDSET_INCR);
listenToPort(server.port,&server.ipfd);
createSocketAcceptHandler(&server.ipfd, acceptTcpHandler);
}看一下createSocketAcceptHandler的实现,代码如下:
int createSocketAcceptHandler(socketFds *sfd, aeFileProc *accept_handler) {
int j;
for (j = 0; j < sfd->count; j++) {
// AE_READABLE就是客户端的连接事件, accept_handler就是用来处理TCP连接请求
if (aeCreateFileEvent(server.el, sfd->fd[j], AE_READABLE, accept_handler,NULL) == AE_ERR) {
/* Rollback */
for (j = j-1; j >= 0; j--) aeDeleteFileEvent(server.el, sfd->fd[j], AE_READABLE);
return C_ERR;
}
}
return C_OK;
}可以看到是由aeCreateFileEvent来实现事件和处理函数的注册的,可以看一下具体的实现实现:
int aeCreateFileEvent(aeEventLoop *eventLoop, int fd, int mask,
aeFileProc *proc, void *clientData)
{
...
aeFileEvent *fe = &eventLoop->events[fd];
if (aeApiAddEvent(eventLoop, fd, mask) == -1)
return AE_ERR;
...
if (mask & AE_READABLE) fe->rfileProc = proc;
if (mask & AE_WRITABLE) fe->wfileProc = proc;
fe->clientData = clientData;
if (fd > eventLoop->maxfd)
eventLoop->maxfd = fd;
}可以看到调用aeApiAddEvent来注册事件,aeApiAddEvent调用的就是具体的实现接口,如果使用epoll,那么实现如下:
static int aeApiAddEvent(aeEventLoop *eventLoop, int fd, int mask) {
...
if (epoll_ctl(state->epfd,op,fd,&ee) == -1) return -1;
return 0;
}可以看到是通过epoll_ctl来注册监听的事件和响应的处理函数的。
事件捕获与分发:aeProcessEvents函数
在server.c的main函数的最后,会调用aeMain函数开始执行事件驱动框架,我们看一下代码。
void aeMain(aeEventLoop *eventLoop) {
eventLoop->stop = 0;
while (!eventLoop->stop) {
// AE_ALL_EVENTS (AE_FILE_EVENTS|AE_TIME_EVENTS)
aeProcessEvents(eventLoop, AE_ALL_EVENTS|
AE_CALL_BEFORE_SLEEP|
AE_CALL_AFTER_SLEEP);
}
}接下来我们进入aeProcessEvents函数看一下:
int aeProcessEvents(aeEventLoop *eventLoop, int flags)
{
// 若没有事件处理,则立即返回,根据传入的参数,不会返回0的
if (!(flags & AE_TIME_EVENTS) && !(flags & AE_FILE_EVENTS)) return 0;
//如果有IO事件发生,或者紧急的时间时间发生,则开始处理
if (eventLoop->maxfd != -1 || ((flags & AE_TIME_EVENTS) && !(flags & AE_DONT_WAIT))) {
...
}
// 查看是否有时间事件,如果,则调用processTimeEvents
if (flags & AE_TIME_EVENTS)
processed += processTimeEvents(eventLoop);
// 返回已经处理的文件或者事件
return processed;
}我们主要关注第二个分支事件,有IO事件发生的场景,看代码。
int aeProcessEvents(aeEventLoop *eventLoop, int flags) {
//如果有IO事件发生,或者紧急的时间时间发生,则开始处理
if (eventLoop->maxfd != -1 || ((flags & AE_TIME_EVENTS) && !(flags & AE_DONT_WAIT))) {
...
numevents = aeApiPoll(eventLoop, tvp);
...
for (j = 0; j < numevents; j++) {
// 处理读事件
if (!invert && fe->mask & mask & AE_READABLE) {
fe->rfileProc(eventLoop,fd,fe->clientData,mask);
}
// 处理写事件
if (fe->mask & mask & AE_WRITABLE) {
fe->wfileProc(eventLoop,fd,fe->clientData,mask);
}
/* 如果读写事件翻转, 处理读事件*/
if (invert) {
fe->rfileProc(eventLoop,fd,fe->clientData,mask);
}
}
}
}主要是通过aeApiPoll函数来捕获事件的,Redis是依赖于操作系统底层提供的IO多路复用机制,来捕获事件,检查是否有新的连接,读写事件发生。
这个代码的实现是Redis根据不同的操作系统进行了一层封装,由于我们讨论的是epoll,可以看一下epoll的实现
static int aeApiPoll(aeEventLoop *eventLoop, struct timeval *tvp) {
aeApiState *state = eventLoop->apidata;
int retval, numevents = 0;
// 调用epoll_wait获取监听到的事件
retval = epoll_wait(state->epfd,state->events,eventLoop->setsize,
tvp ? (tvp->tv_sec*1000 + (tvp->tv_usec + 999)/1000) : -1);
if (retval > 0) {
...
numevents = retval;
}
return numevents;
}aeProcessEvents中我们可以看到调用aeApiPoll获取完事件之后,会遍历事件,进行响应的处理,对于AE_READABLE事件,执行fe->rfileProc; 对于AE_WRITABLE,执行fe->wfileProc。
我们回看createSocketAcceptHandler方法的执行,可以看到,对于新进来的请求,事件处理函数都是acceptTcpHandler。
Handler注册
接下来我们看一下acceptTcpHandler的实现,代码如下所示:
void acceptTcpHandler(aeEventLoop *el, int fd, void *privdata, int mask) {
...
while(max--) {
// 调用accept来获取对应的链接
cfd = anetTcpAccept(server.neterr, fd, cip, sizeof(cip), &cport);
...
acceptCommonHandler(connCreateAcceptedSocket(cfd),0,cip);
}
}anetTcpAccept底层是通过accept来接收连接的,这里不展开,我们看acceptCommonHandler函数
static void acceptCommonHandler(connection *conn, int flags, char *ip) {
/*
* 连接状态检查
*/
if (connGetState(conn) != CONN_STATE_ACCEPTING) {
return
}
/*
* 连接数限制检查,确保当前连接数和集群连接数只和不会超出最大连接数限制
*/
if (listLength(server.clients) + getClusterConnectionsCount()
>= server.maxclients) {
return
}
/* 新建一个连接 */
if ((c = createClient(conn)) == NULL) {
return;
}
// conn->type->accept(conn, accept_handler)
if (connAccept(conn, clientAcceptHandler) == C_ERR) {
...
return;
}
}我们先看createClient方法,新建一个连接的, 代码如下。
client *createClient(connection *conn) {
if (conn) {
connEnableTcpNoDelay(conn);
if (server.tcpkeepalive)
connKeepAlive(conn,server.tcpkeepalive);
// conn->type->set_read_handler(conn, func)
connSetReadHandler(conn, readQueryFromClient);
connSetPrivateData(conn, c);
}
}可以看到connSetReadHandler是调用了conn->type->set_read_handler这个方法,我们看一下这个方法是在哪里赋值的。回看acceptTcpHandler方法里面的acceptCommonHandler的参数connCreateAcceptedSocket(cfd), 查看具体的代码实现
connection *connCreateAcceptedSocket(int fd) {
connection *conn = connCreateSocket();
conn->fd = fd;
conn->state = CONN_STATE_ACCEPTING;
return conn;
}
connection *connCreateSocket() {
connection *conn = zcalloc(sizeof(connection));
conn->type = &CT_Socket;
conn->fd = -1;
return conn;
}可以看到conn->type指向了CT_Socket,查看CT_Socket的实现
ConnectionType CT_Socket = {
.ae_handler = connSocketEventHandler,
.set_read_handler = connSocketSetReadHandler,
};可以看到是connSocketSetReadHandler,查看代码实现。
static int connSocketSetReadHandler(connection *conn, ConnectionCallbackFunc func) {
if (func == conn->read_handler) return C_OK;
conn->read_handler = func;
if (!conn->read_handler)
aeDeleteFileEvent(server.el,conn->fd,AE_READABLE);
else
if (aeCreateFileEvent(server.el,conn->fd,
AE_READABLE,conn->type->ae_handler,conn) == AE_ERR) return C_ERR;
return C_OK;
}可以看到这里也是调用aeCreateFileEvent方法来注册事件的。所以在上面aeProcessEvents的循环捕获中也捕获这些请求的读写事件,并且调用对应的handler,而对于这些请求的handler,就是readQueryFromClient。
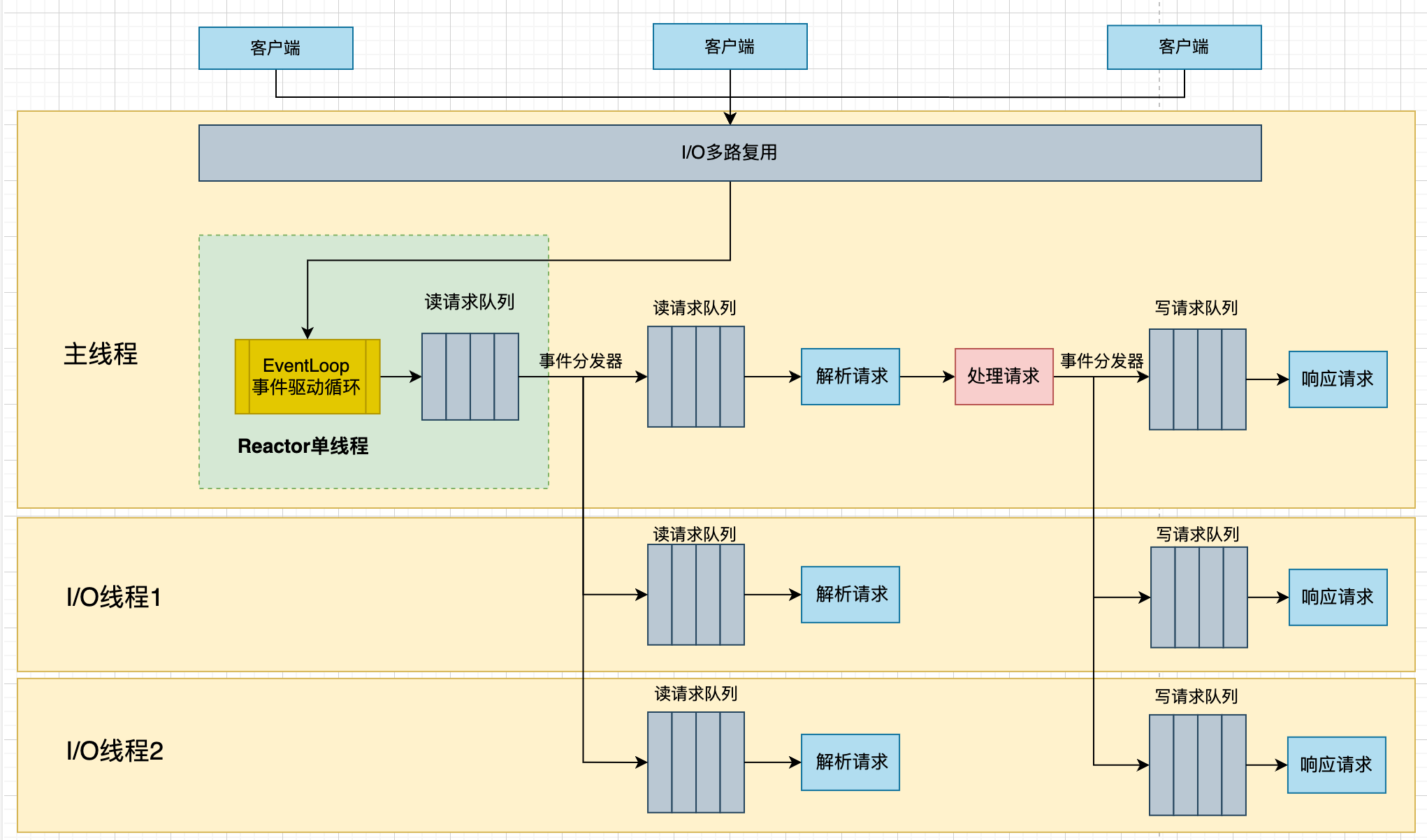
多线程I/O模型
接下来开始讲解Redis的请求执行流程。在redis6.0之前,redis使用的是单线程处理模型,也就是说请求的获取,解析,执行,内容返回等都是由一个顺序串行的主线程处理的。
关于为什么redis6.0之前redis是单线程模型的,官方的解释如下:
- Redis的性能瓶颈主要在于内存和网络I/O,而不是CPU。
- 通过Pipeline,Redis每秒可以处理一百万个请求,应用程序使用的命令复杂度是O(n)或O(lgN),不会占用太多CPU。
- 单线程模型代码可维护性比较高,不用考虑并行代码的不确定性,还有线程切换,加锁读写,死锁等造成的性能问题。
但是随着底层网络硬件性能的提升,Redis的性能逐渐体现在网络I/O的读写上,单个线程处理网络读/写速度跟不上底层网络硬件执行的速度,主线程在网络读/写请求处理上花费的时间占比比较大,所有在redis6.0以后,redis采用多个I/O进程来处理网络请求,但是执行的时候还是由主线程来处理。
多线程开启
Redis的多线程模型默认是关闭的,如果要开启多线程模型,需要修改redis.conf配置文件中的配置,主要由两个
io-threads 4 # IO线程数, 包含主线程
io-threads-do-reads yes # 开启IO多线程好了,接下来我们从源码分析一下redis的多线程模型。首先我们来看一下多线程处理模型的第一步,将请求放到读请求队列中。
请求接收
在前面我们知道,客户端发过来的请求是在readQueryFromClient进行处理的,所以我们查看这个函数,这个函数非常核心且重要,我们先一步步来看。
void readQueryFromClient(connection *conn) {
if (postponeClientRead(c)) return;
// 如果不走IO多线程,则直接处理
...
}
int postponeClientRead(client *c) {
if (server.io_threads_active &&
server.io_threads_do_reads &&
!ProcessingEventsWhileBlocked &&
!(c->flags & (CLIENT_MASTER|CLIENT_SLAVE|CLIENT_BLOCKED)) &&
io_threads_op == IO_THREADS_OP_IDLE)
{
listAddNodeHead(server.clients_pending_read,c);
c->pending_read_list_node = listFirst(server.clients_pending_read);
return 1;
} else {
return 0;
}
}可以看到如果是多线程的话,会把请求直接放到读请求队列clients_pending_read中。这里看一下这几个判断条件
- server.io_threads_active: 是否启用了多线程,注意这个值是redis的内部值,不可以通过配置修改,当请求很多时会自动开启,看startThreadedIO函数。
- server.io_threads_do_reads: redis.conf中的io-threads-do-reads值
- !ProcessingEventsWhileBlocked: Redis没有在处理阻塞事件, 比如在处理BLOCK类型的命令
- !(c->flags & (CLIENT_MASTER|CLIENT_SLAVE|CLIENT_BLOCKED)): 客户端既不是主服务器,也不是从服务器,也没有处于阻塞状态。即,客户端处于正常的非阻塞状态
- io_threads_op: IO_THREADS_OP_IDLE表示当前处于空闲状态
读请求分发
接下来看读请求分发流程,我们回到aeProcessEvents函数在处理读写事件的地方,代码具体如下:
int aeProcessEvents(aeEventLoop *eventLoop, int flags) {
if (eventLoop->beforesleep != NULL && flags & AE_CALL_BEFORE_SLEEP)
eventLoop->beforesleep(eventLoop);
/* Call the multiplexing API, will return only on timeout or when
* some event fires. */
numevents = aeApiPoll(eventLoop, tvp);
/* After sleep callback. */
if (eventLoop->aftersleep != NULL && flags & AE_CALL_AFTER_SLEEP)
eventLoop->aftersleep(eventLoop);
}可以看到调用eventLoop->beforesleep方法,这个方法的注册在server.c的initServer方法里面
void initServer(void) {
/* Register before and after sleep handlers (note this needs to be done
* before loading persistence since it is used by processEventsWhileBlocked. */
aeSetBeforeSleepProc(server.el,beforeSleep);
aeSetAfterSleepProc(server.el,afterSleep);
}查看beforeSleep方法,只看跟这节课相关的方法。
void beforeSleep(struct aeEventLoop *eventLoop) {
/* 在这处理读请求事件 */
/* We should handle pending reads clients ASAP after event loop. */
handleClientsWithPendingReadsUsingThreads();
/* 在这处理写请求事件 */
/* Handle writes with pending output buffers. */
handleClientsWithPendingWritesUsingThreads();
}先看handleClientsWithPendingReadsUsingThreads,进入这个方法。
int handleClientsWithPendingReadsUsingThreads(void) {
// 如果没有启用多线程,那么就直接返回
if (!server.io_threads_active || !server.io_threads_do_reads) return 0;
/* 在这里将clients_pending_read的请求任务按照轮询算法分发给所有的I/O线程 */
listRewind(server.clients_pending_read,&li);
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
int target_id = item_id % server.io_threads_num;
listAddNodeTail(io_threads_list[target_id],c);
item_id++;
}
/* 启动I/O线程, 将io_threads_op设置为IO_THREADS_OP_READ读状态*/
io_threads_op = IO_THREADS_OP_READ;
for (int j = 1; j < server.io_threads_num; j++) {
int count = listLength(io_threads_list[j]);
setIOPendingCount(j, count);
}
/* 主线程处理io_threads_list[0]的请求 */
listRewind(io_threads_list[0],&li);
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
readQueryFromClient(c->conn);
}
listEmpty(io_threads_list[0]);
/* 等待所有的I/O线程解析成功 */
while(1) {
unsigned long pending = 0;
for (int j = 1; j < server.io_threads_num; j++)
pending += getIOPendingCount(j);
if (pending == 0) break;
}
}到这为止我们就看到了,任务是会轮询分发给所有的io_threads_list队列的,然后由各个I/O线程处理
I/O线程初始化
让我们回到server.c中的main函数,可以看到里面调用了initServerLast方法。
int main(int argc, char **argv) {
InitServerLast();
}
void InitServerLast() {
// I/O线程初始化
initThreadedIO();
}接下来我们查看initThreadedIO的实现,代码如下所示
void initThreadedIO(void) {
/* We start with threads not active. */
server.io_threads_active = 0;
/* Indicate that io-threads are currently idle */
io_threads_op = IO_THREADS_OP_IDLE;
/* Don't spawn any thread if the user selected a single thread:
* we'll handle I/O directly from the main thread. */
if (server.io_threads_num == 1) return;
if (server.io_threads_num > IO_THREADS_MAX_NUM) {
serverLog(LL_WARNING,"Fatal: too many I/O threads configured. "
"The maximum number is %d.", IO_THREADS_MAX_NUM);
exit(1);
}
/* Spawn and initialize the I/O threads. */
for (int i = 0; i < server.io_threads_num; i++) {
/* Things we do for all the threads including the main thread. */
io_threads_list[i] = listCreate();
/* 线程号为0的是主线程 */
if (i == 0) continue; /* Thread 0 is the main thread. */
/* Things we do only for the additional threads. */
pthread_t tid;
pthread_mutex_init(&io_threads_mutex[i],NULL);
setIOPendingCount(i, 0);
pthread_mutex_lock(&io_threads_mutex[i]); /* Thread will be stopped. */
// 创建线程,每个线程执行IOThreadMain
if (pthread_create(&tid,NULL,IOThreadMain,(void*)(long)i) != 0) {
serverLog(LL_WARNING,"Fatal: Can't initialize IO thread.");
exit(1);
}
io_threads[i] = tid;
}
}接下来我们看每个I/O线程做的事情,代码如下所示:
void *IOThreadMain(void *myid) {
for (int j = 0; j < 1000000; j++) {
if (getIOPendingCount(id) != 0) break;
}
listRewind(io_threads_list[id],&li);
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
if (io_threads_op == IO_THREADS_OP_WRITE) {
writeToClient(c,0);
// 刚才在梳理handleClientsWithPendingReadsUsingThreads的时候是IO_THREADS_OP_READ
} else if (io_threads_op == IO_THREADS_OP_READ) {
readQueryFromClient(c->conn);
} else {
serverPanic("io_threads_op value is unknown");
}
}
listEmpty(io_threads_list[id]);
setIOPendingCount(id, 0);
}所以所有的I/O线程都是执行readQueryFromClient这个函数来解析请求,那我们继续看这个时间段,会做些什么。
解析请求
void readQueryFromClient(connection *conn) {
nread = connRead(c->conn, c->querybuf+qblen, readlen);
/* There is more data in the client input buffer, continue parsing it
* and check if there is a full command to execute. */
if (processInputBuffer(c) == C_ERR)
c = NULL;
}可以看到就是从客户端读取数据,然后调用processInputBuffer方法处理,接下来看这个函数。
int processInputBuffer(client *c) {
/* 现在是IO_THREADS_OP_READ状态,所以直接跳出去*/
if (io_threads_op != IO_THREADS_OP_IDLE) {
serverAssert(io_threads_op == IO_THREADS_OP_READ);
c->flags |= CLIENT_PENDING_COMMAND;
break;
}
/* 执行命令 */
if (processCommandAndResetClient(c) == C_ERR) {
/* If the client is no longer valid, we avoid exiting this
* loop and trimming the client buffer later. So we return
* ASAP in that case. */
return C_ERR;
}
}可以看到如果是IO_THREADS_OP_READ状态时,所有的I/O线程只是负责获取请求的数据。
请求解析与处理
让我们回到handleClientsWithPendingReadsUsingThreads方法,看接下来做的事情
int handleClientsWithPendingReadsUsingThreads(void) {
io_threads_op = IO_THREADS_OP_IDLE;
/* Run the list of clients again to process the new buffers. */
while(listLength(server.clients_pending_read)) {
ln = listFirst(server.clients_pending_read);
client *c = listNodeValue(ln);
listDelNode(server.clients_pending_read,ln);
c->pending_read_list_node = NULL;
/* Once io-threads are idle we can update the client in the mem usage */
updateClientMemUsageAndBucket(c);
/* 执行请求 */
if (processPendingCommandAndInputBuffer(c) == C_ERR) {
/* If the client is no longer valid, we avoid
* processing the client later. So we just go
* to the next. */
continue;
}
/* 如果readQueryFromClient()产生了回复并且没有放到待处理的写队列中,这些需要我们处理 */
if (!(c->flags & CLIENT_PENDING_WRITE) && clientHasPendingReplies(c))
putClientInPendingWriteQueue(c);
}
}可以看到调用processPendingCommandAndInputBuffer这个函数,让我们看这个函数的实现
int processPendingCommandAndInputBuffer(client *c) {
if (c->flags & CLIENT_PENDING_COMMAND) {
c->flags &= ~CLIENT_PENDING_COMMAND;
if (processCommandAndResetClient(c) == C_ERR) {
return C_ERR;
}
}
/* 如果客户端有更多数据,对其进行处理 */
if (c->querybuf && sdslen(c->querybuf) > 0) {
return processInputBuffer(c);
}
}可以看到processInputBuffer跟processPendingCommandAndInputBuffer都会调用processCommandAndResetClient这个方法,看函数名字就知道是处理命令的了。
int processCommandAndResetClient(client *c) {
// 根据请求的数据查找执行的方法并且执行
if (processCommand(c) == C_OK) {
commandProcessed(c);
/* Update the client's memory to include output buffer growth following the
* processed command. */
updateClientMemUsageAndBucket(c);
}
}重点查看processCommand方法,忽略掉一部分代码。
int processCommand(client *c) {
/* Exec the command */
// 事务命令
if (c->flags & CLIENT_MULTI &&
c->cmd->proc != execCommand &&
c->cmd->proc != discardCommand &&
c->cmd->proc != multiCommand &&
c->cmd->proc != watchCommand &&
c->cmd->proc != quitCommand &&
c->cmd->proc != resetCommand)
{
queueMultiCommand(c, cmd_flags);
addReply(c,shared.queued);
} else {
// 执行命令
call(c,CMD_CALL_FULL);
c->woff = server.master_repl_offset;
if (listLength(server.ready_keys) && !isInsideYieldingLongCommand())
handleClientsBlockedOnKeys();
}
}查看call方法,这里会调用c->cmd->proc()执行命令。
void call(client *c, int flags) {
c->cmd->proc(c);
}返回结果
执行完命令之后,如果有数据返回,会把数据放到client_pending_write写队列中。这里以String的GET命令为例.
int getGenericCommand(client *c) {
robj *o;
if ((o = lookupKeyReadOrReply(c,c->argv[1],shared.null[c->resp])) == NULL)
return C_OK;
if (checkType(c,o,OBJ_STRING)) {
return C_ERR;
}
// 返回结果
addReplyBulk(c,o);
return C_OK;
}查看addReplyBulk方法,代码如下:
void addReplyBulk(client *c, robj *obj) {
addReplyBulkLen(c,obj);
addReply(c,obj);
addReply(c,shared.crlf);
}
/* Add the object 'obj' string representation to the client output buffer. */
void addReply(client *c, robj *obj) {
if (prepareClientToWrite(c) != C_OK) return;
...
}
int prepareClientToWrite(client *c) {
if (!clientHasPendingReplies(c) && io_threads_op == IO_THREADS_OP_IDLE)
putClientInPendingWriteQueue(c);
}
void putClientInPendingWriteQueue(client *c) {
if (!(c->flags & CLIENT_PENDING_WRITE) &&
(c->replstate == REPL_STATE_NONE ||
(c->replstate == SLAVE_STATE_ONLINE && !c->repl_start_cmd_stream_on_ack)))
{
c->flags |= CLIENT_PENDING_WRITE;
/* 在这里放到clients_pending_write中
listAddNodeHead(server.clients_pending_write,c);
}
}好了,handleClientsWithPendingReadsUsingThreads到这里结束。
写请求分发
void beforeSleep(struct aeEventLoop *eventLoop) {
/* 在这处理读请求事件 */
/* We should handle pending reads clients ASAP after event loop. */
handleClientsWithPendingReadsUsingThreads();
/* 在这处理写请求事件 */
/* Handle writes with pending output buffers. */
handleClientsWithPendingWritesUsingThreads();
}I/O多线程是在handleClientsWithPendingWritesUsingThreads里面处理写请求分发的,我们点进这个函数查看。
int handleClientsWithPendingWritesUsingThreads(void) {
/* 如果没有使用I/O多线程,走这里,由主线程把请求返回去*/
if (server.io_threads_num == 1 || stopThreadedIOIfNeeded()) {
return handleClientsWithPendingWrites();
}
/* 可以看到是在这边判断是不是要使用多线程的,如果需要多线程则启动 */
if (!server.io_threads_active) startThreadedIO();
listRewind(server.clients_pending_write,&li);
int item_id = 0;
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
c->flags &= ~CLIENT_PENDING_WRITE;
/* 如果需要关闭连接,则走这里*/
if (c->flags & CLIENT_CLOSE_ASAP) {
listDelNode(server.clients_pending_write, ln);
continue;
}
/* 由主线程发送所有副本的缓冲区 */
if (getClientType(c) == CLIENT_TYPE_SLAVE) {
listAddNodeTail(io_threads_list[0],c);
continue;
}
/* 按轮询算法分发写请求 */
int target_id = item_id % server.io_threads_num;
listAddNodeTail(io_threads_list[target_id],c);
item_id++;
/* 唤醒I/O线程 */
io_threads_op = IO_THREADS_OP_WRITE;
for (int j = 1; j < server.io_threads_num; j++) {
int count = listLength(io_threads_list[j]);
setIOPendingCount(j, count);
}
/* 主线程负责o_threads_list[0]的写请求 */
listRewind(io_threads_list[0],&li);
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
writeToClient(c,0);
}
listEmpty(io_threads_list[0]);
/* 等待所有的I/O线程处理完成 */
while(1) {
unsigned long pending = 0;
for (int j = 1; j < server.io_threads_num; j++)
pending += getIOPendingCount(j);
if (pending == 0) break;
}
/* 将I/O线程变成空闲状态 */
io_threads_op = IO_THREADS_OP_IDLE;
}
}好了,我们看一下I/O线程的处理方法。
void *IOThreadMain(void *myid) {
for (int j = 0; j < 1000000; j++) {
if (getIOPendingCount(id) != 0) break;
}
listRewind(io_threads_list[id],&li);
while((ln = listNext(&li))) {
client *c = listNodeValue(ln);
/* 现在是IO_THREADS_OP_WRITE状态 */
if (io_threads_op == IO_THREADS_OP_WRITE) {
writeToClient(c,0);
} else if (io_threads_op == IO_THREADS_OP_READ) {
readQueryFromClient(c->conn);
} else {
serverPanic("io_threads_op value is unknown");
}
}
listEmpty(io_threads_list[id]);
setIOPendingCount(id, 0);
}至于writeToClient就不分析了,就是把数据返回给客户端。
命令解析处理
在本章的最后,梳理一下是怎么根据一个请求找到对应的命令处理函数来处理的。
所有的命令以及处理函数都是封装在command.c文件中的redisCommandTable,这里列出来一部分。
struct redisCommand redisCommandTable[] = {
/* bitmap */
{"bitcount","Count set bits in a string","O(N)","2.6.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,BITCOUNT_History,BITCOUNT_tips,bitcountCommand,-2,CMD_READONLY,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_RO|CMD_KEY_ACCESS,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},.args=BITCOUNT_Args},
{"bitfield","Perform arbitrary bitfield integer operations on strings","O(1) for each subcommand specified","3.2.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,BITFIELD_History,BITFIELD_tips,bitfieldCommand,-2,CMD_WRITE|CMD_DENYOOM,ACL_CATEGORY_BITMAP,{{"This command allows both access and modification of the key",CMD_KEY_RW|CMD_KEY_UPDATE|CMD_KEY_ACCESS|CMD_KEY_VARIABLE_FLAGS,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},bitfieldGetKeys,.args=BITFIELD_Args},
{"bitfield_ro","Perform arbitrary bitfield integer operations on strings. Read-only variant of BITFIELD","O(1) for each subcommand specified","6.0.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,BITFIELD_RO_History,BITFIELD_RO_tips,bitfieldroCommand,-2,CMD_READONLY|CMD_FAST,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_RO|CMD_KEY_ACCESS,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},.args=BITFIELD_RO_Args},
{"bitop","Perform bitwise operations between strings","O(N)","2.6.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,BITOP_History,BITOP_tips,bitopCommand,-4,CMD_WRITE|CMD_DENYOOM,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_OW|CMD_KEY_UPDATE,KSPEC_BS_INDEX,.bs.index={2},KSPEC_FK_RANGE,.fk.range={0,1,0}},{NULL,CMD_KEY_RO|CMD_KEY_ACCESS,KSPEC_BS_INDEX,.bs.index={3},KSPEC_FK_RANGE,.fk.range={-1,1,0}}},.args=BITOP_Args},
{"bitpos","Find first bit set or clear in a string","O(N)","2.8.7",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,BITPOS_History,BITPOS_tips,bitposCommand,-3,CMD_READONLY,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_RO|CMD_KEY_ACCESS,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},.args=BITPOS_Args},
{"getbit","Returns the bit value at offset in the string value stored at key","O(1)","2.2.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,GETBIT_History,GETBIT_tips,getbitCommand,3,CMD_READONLY|CMD_FAST,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_RO|CMD_KEY_ACCESS,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},.args=GETBIT_Args},
{"setbit","Sets or clears the bit at offset in the string value stored at key","O(1)","2.2.0",CMD_DOC_NONE,NULL,NULL,COMMAND_GROUP_BITMAP,SETBIT_History,SETBIT_tips,setbitCommand,4,CMD_WRITE|CMD_DENYOOM,ACL_CATEGORY_BITMAP,{{NULL,CMD_KEY_RW|CMD_KEY_ACCESS|CMD_KEY_UPDATE,KSPEC_BS_INDEX,.bs.index={1},KSPEC_FK_RANGE,.fk.range={0,1,0}}},.args=SETBIT_Args},
/* cluster */
.....
}可以看到bitcount对应的处理函数是bitcountCommand。
接下来我们查看server.c中main函数的initServerConfig方法,可以看到调用了populateCommandTable方法
int main(int argc, char **argv) {
initServerConfig();
}
void initServerConfig(void) {
populateCommandTable();
}
void populateCommandTable(void) {
for (j = 0;; j++) {
c = redisCommandTable + j;
retval1 = dictAdd(server.commands, sdsdup(c->fullname), c);
/* Populate an additional dictionary that will be unaffected
* by rename-command statements in redis.conf. */
retval2 = dictAdd(server.orig_commands, sdsdup(c->fullname), c);
}
}可以看到是封装到了server.orig_commands跟server.commands中。
回到前面分析到的请求执行的方法processCommand。
int processCommand(client *c) {
/* Now lookup the command and check ASAP about trivial error conditions
* such as wrong arity, bad command name and so forth. */
c->cmd = c->lastcmd = c->realcmd = lookupCommand(c->argv,c->argc);
}
/* 可以看到是这个函数里面查找执行方法的,后面的就不细讲了 */
struct redisCommand *lookupCommand(robj **argv, int argc) {
return lookupCommandLogic(server.commands,argv,argc,0);
}总的来说,如果想要找到一个命令的实现方法,直接看command.c就好了。